
AMMI Lab
Advanced Materials & Medical Instruments Lab
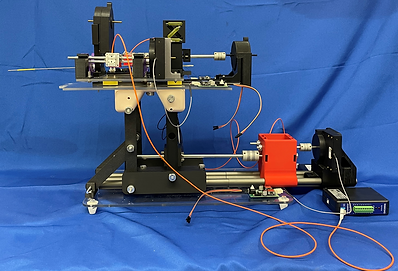
MRI CONDITIONAL ROBOT UTILIZING ACTIVE NEEDLE STEERING

Journal Papers
- Varnamkhasti, Z.K. and Konh, B., 2019. Design and performance study of a novel minimally invasive active surgical needle. ASME Journal of Medical Devices, 13 (4), p.041006 (9 pages).
- Konh, B., Sasaki, D., Podder, T.K., and Ashrafiuon, H., 2019. 3D manipulation of an active steerable needle via actuation of multiple SMA wires. Robotica, pp.1-17. (https://doi.org/10.1017/S0263574719000705).
Conference Papers
- Varnamkhasti, Z.K., Konh, B., 2020, April. Cable-driven 3D steerable surgical needle for needle-based procedures. In 2020 Design of Medical Devices Conference. American Society of Mechanical Engineers (under review)
- Karimi, S., Konh, B., 2020, April. Dynamic characteristic analysis and FEM modeling in control of an SMA-actuated multi-link flexible joint active needle. In 2020 Design of Medical Devices Conference. American Society of Mechanical Engineers (under review)
- Karimi, S., Konh, B., 2019, April. 3D steerable active surgical needle. In 2019 Design of Medical Devices Conference. American Society of Mechanical Engineers (Paper No. DMD2019-3307, pp. V001T06A015; 6 pages; doi:10.1115/DMD2019-3307)
- Varnamkhasti, Z.K., Konh, B., Maghsoudi, O.H., Yu, Y., Liao, L., 2019, April. Ultrasound needle tracking inside a soft phantom and methods to improve the needle tip visualization. In 2019 Design of Medical Devices Conference. American Society of Mechanical Engineers (Paper No. DMD2019-3299, pp. V001T06A012; 6 pages
Journal Papers
-
Lafreniere, S., Padasdao, B., and Konh, B. (2024) "Towards Design and Development of an MRI Conditional Robot to Enable Curvilinear Transperineal Prostate Biopsy" International Journal of Medical Robotics and Computer Assisted Surgery
Conference Papers
-
Padasdao, B., Imanaka, R., and Konh, B. (2024) "Towards Design and Preliminary Evaluation of an MRI-Compatible Robot for Needle-Based Prostate Interventions – Enabling Needle Bending via a Tendon-Driven Notched Needle" International Mechanical Engineering Congress & Exposition
-
Lafreniere S. and Konh, B. (2024) "Design Consideration and Development of an MRI-Compatible Robot For Prostate Interventions", Design of Medical Devices Conference
-
Lafreniere, S., Sprouse, O.L., Padilla, R.J., and Konh, B., (2023) "Design of an MRI-compatible robot for image-guided needle insertion procedures using active tendon-driven needles", Design of Medical Devices Conference